 |
|
Project name: Codename Hugo 2
Project categorie: Robotics
Project status: 10% finished
Estimated completation: Never ever? ;-)
1. Allgemein
Mein Aktuelles Projekt ist ein Fahrroboter, namens Hugo 2 oder auch A.R.C.Robot (sprich arcro-bot, Autonomous or Radio Controlled Robot). Dieser Roboter wird später einmal nicht nur Hindernissen ausweichen und das Licht verfolgen, nein - er wird auch die Umgebung Kartografieren! Er ist dann nämlich per Funk

 (über eine art Basisstation, s. Project #2 - UniControl) mit dem PC verbunden. Auf diesem läuft ein in Java geschriebenes Programm, welches aus den Empfangenen Daten eine Karte erstellt. Anhand dieser Karte kann sich der Roboter auch orientieren, Hindernisse umfahren ohne das ein Sensor anspricht und Wege im Voraus berechnen. Aber er ist dabei nicht auf den PC angewiesen, sondern ist auch komplett autonom funktionsfähig. Er wird auch einfach zwischen "autonom" und per "Basisstation gesteuert" in laufenden Betrieb umschalten können. Sollte er zumindest, wenn denn alles so funktioniert wie ich mir das vorgestellt habe, denn das Projekt befindet sich sozusagen noch im Alpha Stadium.
(über eine art Basisstation, s. Project #2 - UniControl) mit dem PC verbunden. Auf diesem läuft ein in Java geschriebenes Programm, welches aus den Empfangenen Daten eine Karte erstellt. Anhand dieser Karte kann sich der Roboter auch orientieren, Hindernisse umfahren ohne das ein Sensor anspricht und Wege im Voraus berechnen. Aber er ist dabei nicht auf den PC angewiesen, sondern ist auch komplett autonom funktionsfähig. Er wird auch einfach zwischen "autonom" und per "Basisstation gesteuert" in laufenden Betrieb umschalten können. Sollte er zumindest, wenn denn alles so funktioniert wie ich mir das vorgestellt habe, denn das Projekt befindet sich sozusagen noch im Alpha Stadium.
Das 'Gehirn' von Hugo bildet hauptsächlich der PC in Verbindung mit dem UniControl, aber auch im Roboter selbst werkelt ein eigenes Steuerungs System, damit dieser nicht unbedingt auf den PC angewiesen ist, sofern mal der Funkkontakt abreißen sollte. Ausserdem braucht man dann nicht immer den PC um den Roboter vorzuführen...
Die Steuerung besteht weitgehend aus einem PIC16F877 Microcontroller, (weitere Infos dazu bei Microchip: www.microchip.com) und dem "Funkmodem" mit 2 Funkmodulen von ZFT und einem PIC16F84 zur Aufbereitung der Daten (Fehlererkennung, Parallel in/out(Datenbus), Clientnummer(falls mehrere Roboter angesteuert werden) usw.)
Weitere Infos und natürlich Fotos und Schaltpläne werden noch folgen! (Der Artikel ist noch längst nicht fertig!)
Ein Teil des Roboters ist schon komplett fertig... die Spannungsversorgung und die Motortreiber. Die Beschreibung findet ihr weiter unten.
|
|
|
| ->Top<- |
|
|
2. Das Netzteil
Die Stromversorgung Hugo's wird durch 3 9V Blockakkus sichergestellt. Zwei Stück für die Motoren und einer für die Bordelektronik. Natürlich ist eine Spannung von 9V zu hoch für große teile die Steuerelektronik, da z.B. die PICs 5V benötigen.

 Also befindet sich im Netzteil ein 7805 Festspannungsregler zwischen Batterie und Logikteil.
Also befindet sich im Netzteil ein 7805 Festspannungsregler zwischen Batterie und Logikteil.
Nicht nur die Spannung für die Logik wäre zu hoch, auch die Spannung für die Motoren wäre mit den 18V der beiden zusammengeschalteten Batterien zu hoch (Der Roboter würde viel zu schnell fahren...), und auch dafür ist ein Festspannugsregler zwischengeschaltet. In diesem Fall allerdings ein LM317, also ein einstellbarer Regler. So kann man die maximale Drehzahl der Motoren einigermaßen genau mithilfe eines Potis festlegen. Die eigentliche Regelung geschieht später sowieso über die Motortreiber und den Microcontroller.
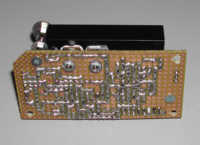 Beim Motortreiber handelt es sich übrigens um einen L293D, einem IC im 16 poligen DIL Gehäuse. Auch dieser ist auf der Netzteilplatine untergebracht, da ich dort ein ziemlich großen Kühlkörper aufmontiert habe. Die beiden Spannungsregler und auch der Motortreiber sind mit Wärmeleitpaste am Kühlkörper befestigt. Dabei musste allerdings darauf geachtet werden, das die Masseflächen der Spannungsregler nicht miteinander verbunden sind, sonst funktioniert es nicht! Es musste also ein nicht leitfähiger Kühlkörper (ist in diesem Fall schwarz lackiert; s. Foto) verwendet werden, oder anstatt der Wärmeleitpaste Wärmeleitpads. Beim Motortreiber handelt es sich übrigens um einen L293D, einem IC im 16 poligen DIL Gehäuse. Auch dieser ist auf der Netzteilplatine untergebracht, da ich dort ein ziemlich großen Kühlkörper aufmontiert habe. Die beiden Spannungsregler und auch der Motortreiber sind mit Wärmeleitpaste am Kühlkörper befestigt. Dabei musste allerdings darauf geachtet werden, das die Masseflächen der Spannungsregler nicht miteinander verbunden sind, sonst funktioniert es nicht! Es musste also ein nicht leitfähiger Kühlkörper (ist in diesem Fall schwarz lackiert; s. Foto) verwendet werden, oder anstatt der Wärmeleitpaste Wärmeleitpads.
Da bei längerem Betrieb oder einem Kurzschluss in einem der Motoren eine ziemmliche Hitze entstehen kann, ist zusätzlich noch ein Temperaturfühler auf der Netzteilplatine. Mit dessen hilfe, kann der Microcontroller später die Temperatur überwachen und im Notfall u.a. die Motoren abschalten. Das steht aber noch nicht fest.
Ein Schaltplan zum Netzteil ist noch in Arbeit, wird aber in den nächsten Tagen nachgeliefert...
|
|
|
| ->Top<- |
|
|
2. Das "Funkmodem"
|
|
|
| ->Top<- |
|
|
|













