| Inhalt | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ©2004/2005 by Dominik S. Herwald | http://www.dsh-elektronik.de/ d.herwald@dsh-elektronik.de |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Kurzbeschreibung | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Der Roboter verfügt über einen embedded PC und kann per Wireless LAN von jedem netzwerkfähigen Computer aus gesteuert werden. Der embedded PC übernimmt die High-Level Steuerung und ein per RS232 angebundener Mikrocontroller steuert ein Netzwerk aus beliebig vielen weiteren Controllern an, die die Echtzeitsteuerung übernehmen. Die Steuerungssoftware auf dem PC wurde nahezu komplett mit Java entwickelt. Es gibt auch eine komplexe Client PC Steuerungssoftware über die sich die Telemetriedaten des Roboters anzeigen und auswerten lassen. Hier kann auch das Videobild einer auf dem Roboter angebrachten Webcam dargestellt werden und der Roboter direkt gesteuert werden. Das Projekt befindet sich noch in der Entwicklungsphase, jedoch ist der Roboter bereits voll Funktionsfähig. Was vor allem noch fehlt ist die KI. D.h. der Roboter kann momentan "nur" mit einem PC gesteuert werden. Dabei ist jedoch darauf zu achten, das es sich hier um keine direkte Fernsteuerung handelt. Man sendet dem Roboter nur kurze Befehlssequenzen und er führt diese aus. (z.B. lässt der Befehl "move(1000,20,fw)" den Roboter mit 8 cm/s 1000mm geradeaus fahren.) [...] Bei dieser Seite handelt es sich um keine komplette Beschreibung des Projekts, eher um eine kleine Zusammenfassung mit den wichtigsten Informationen, einigen Fotos und Videos. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Technische Daten | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Roboter Architektur | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Hier ist die Architektur des Roboters grob in einem Diagramm dargestellt. Im Hintergrund sind die Abstraktionsebenen zu sehen. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Fotos | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
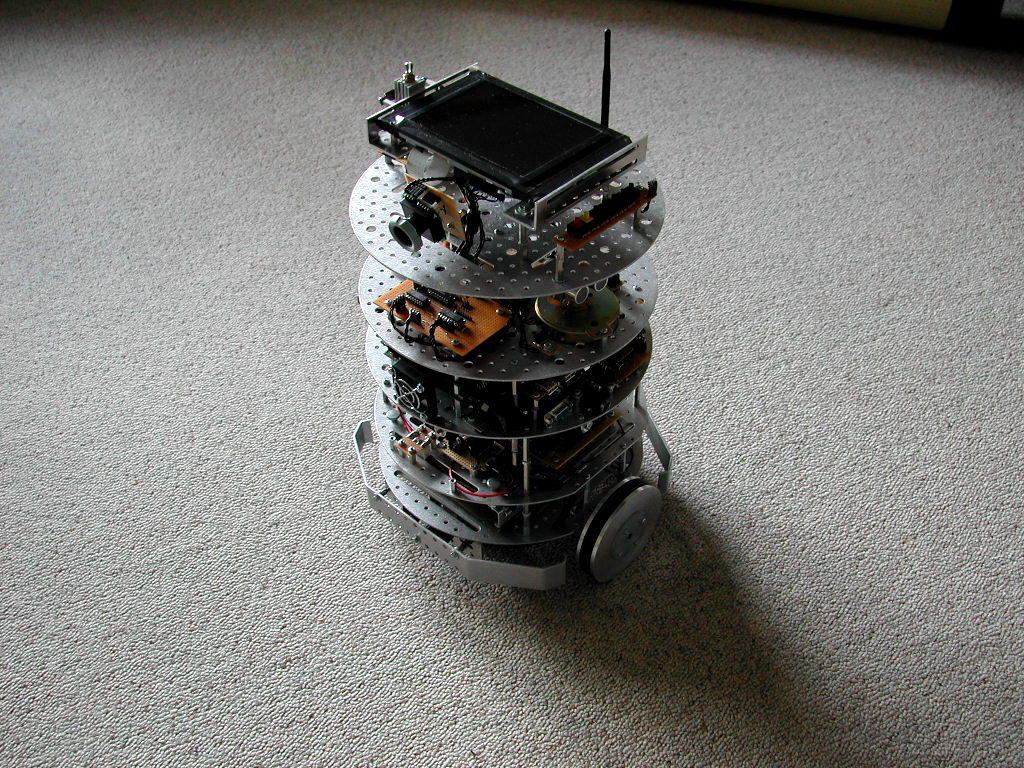
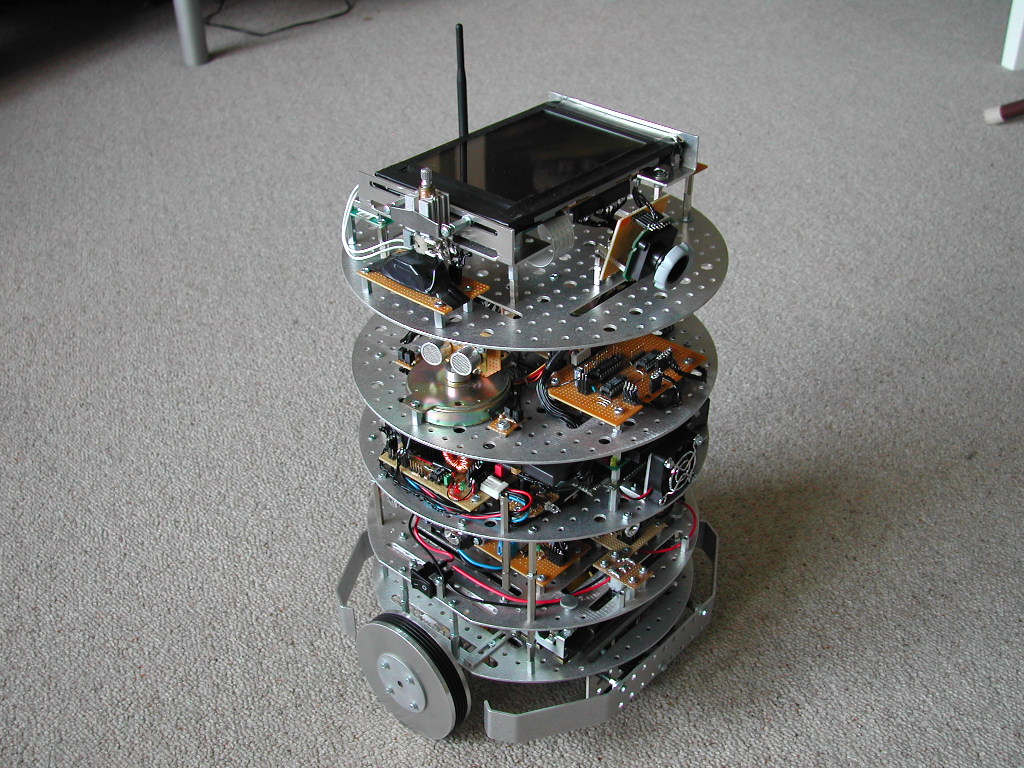
Der Roboter, etwa einen halben Meter hoch... |
... und 25cm Durchmesser |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
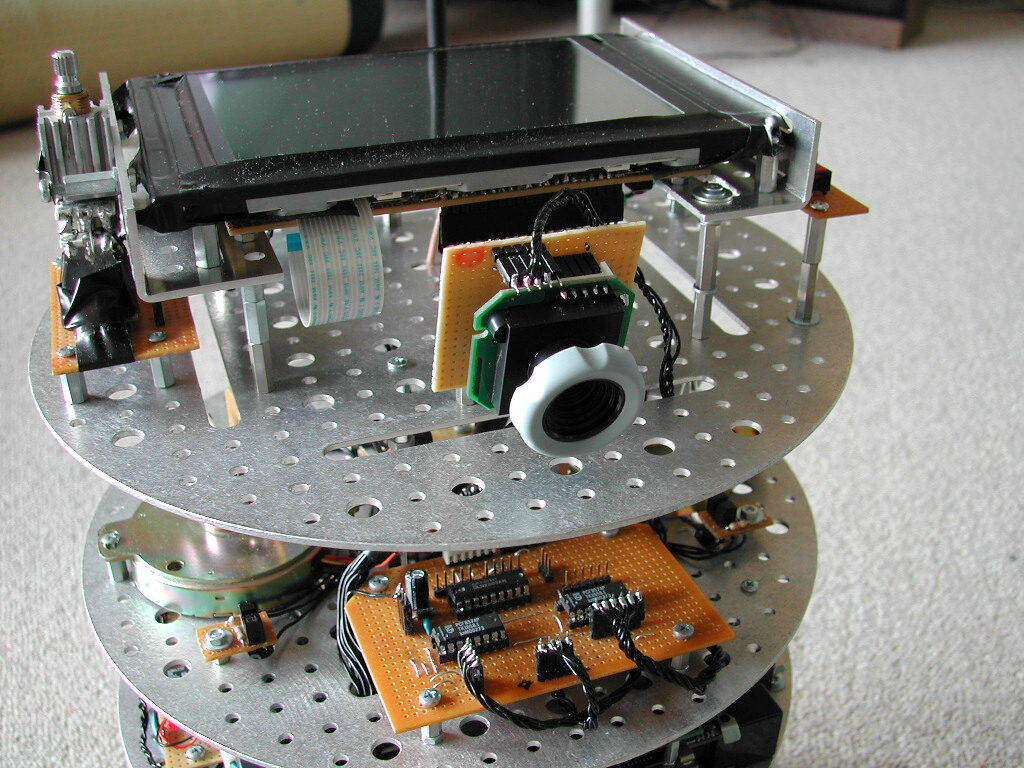
Die Webcam des Roboters |
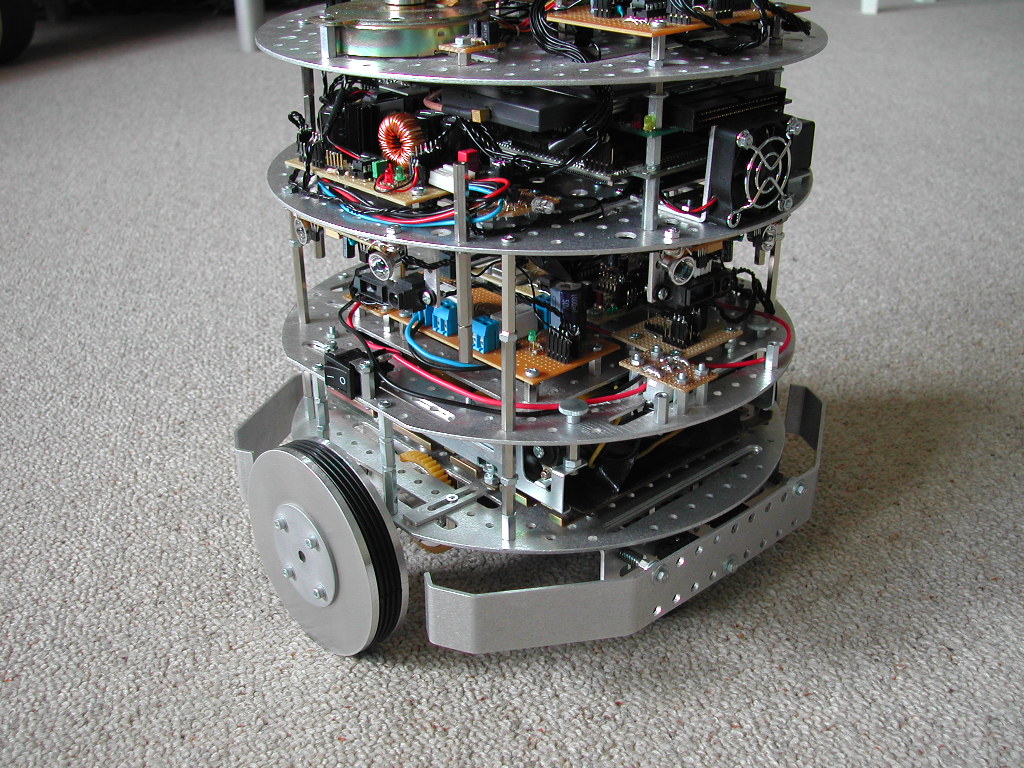
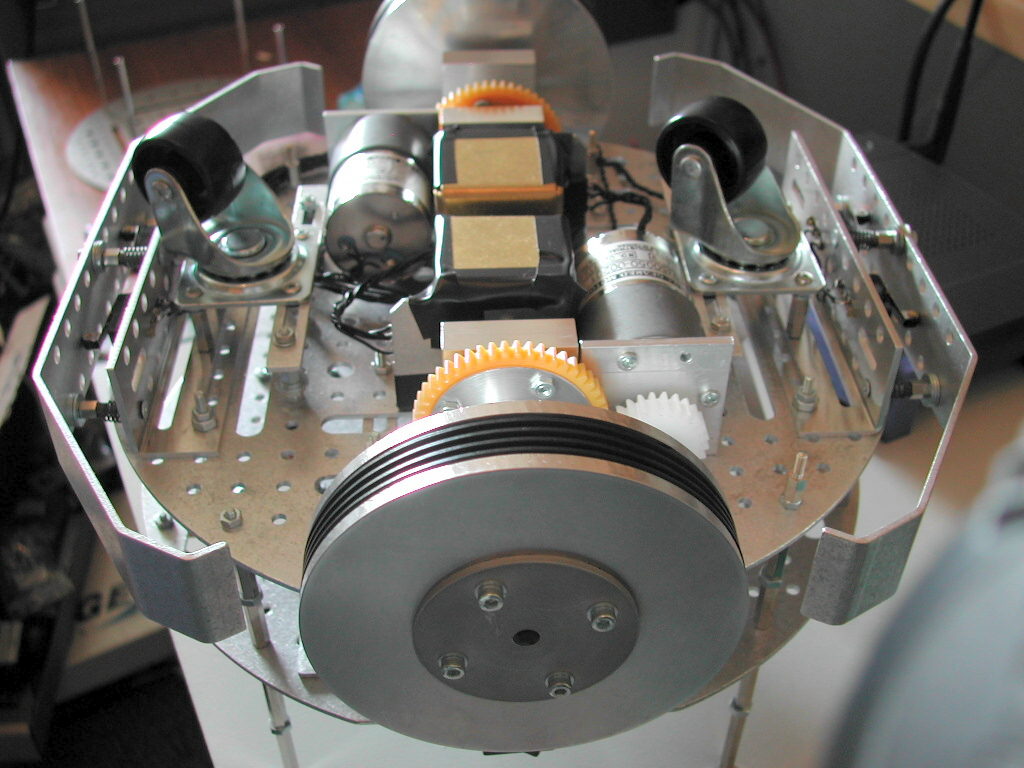
Die Antriebsräder haben 10cm Durchmesser und sind recht schwer... |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
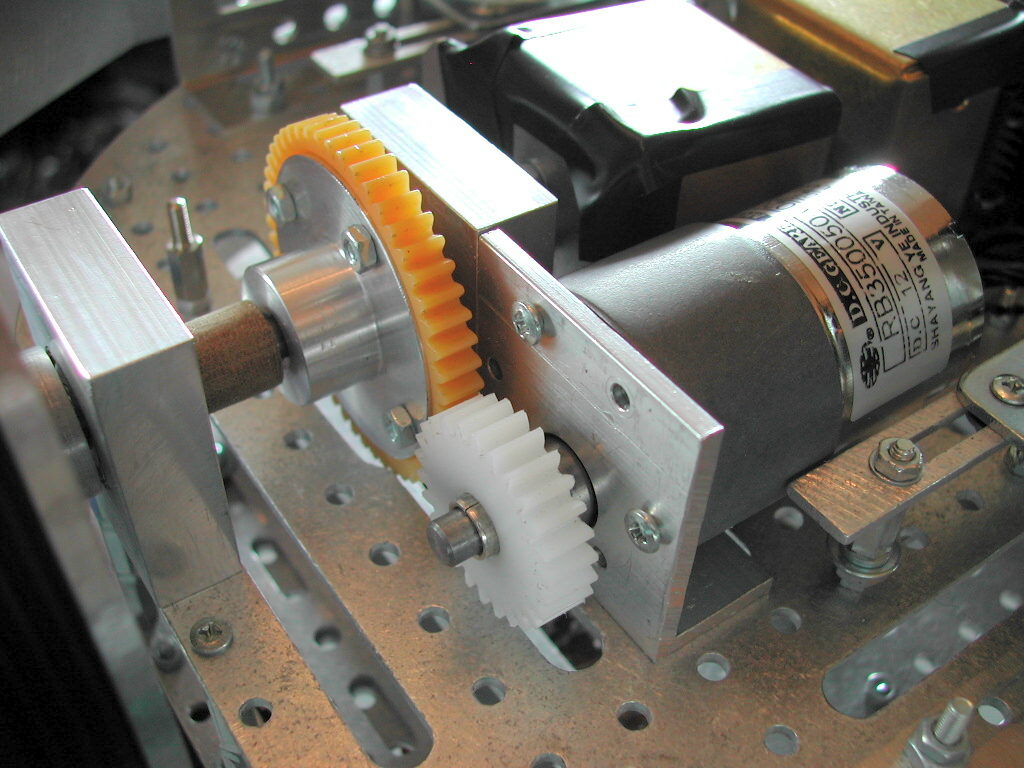
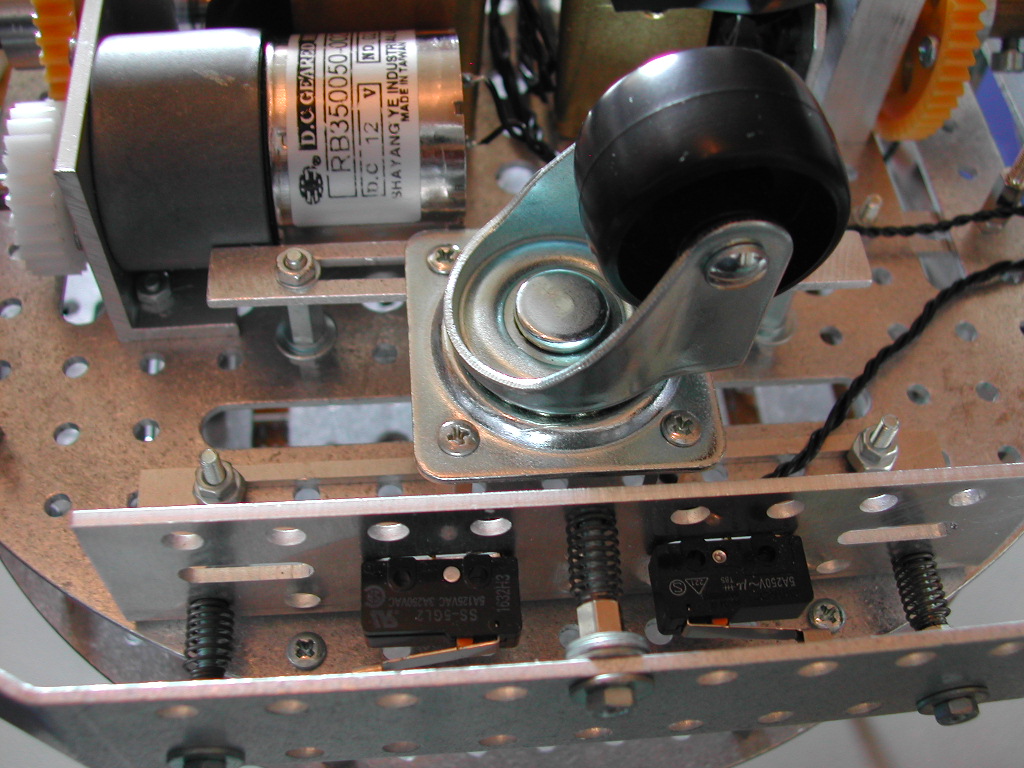
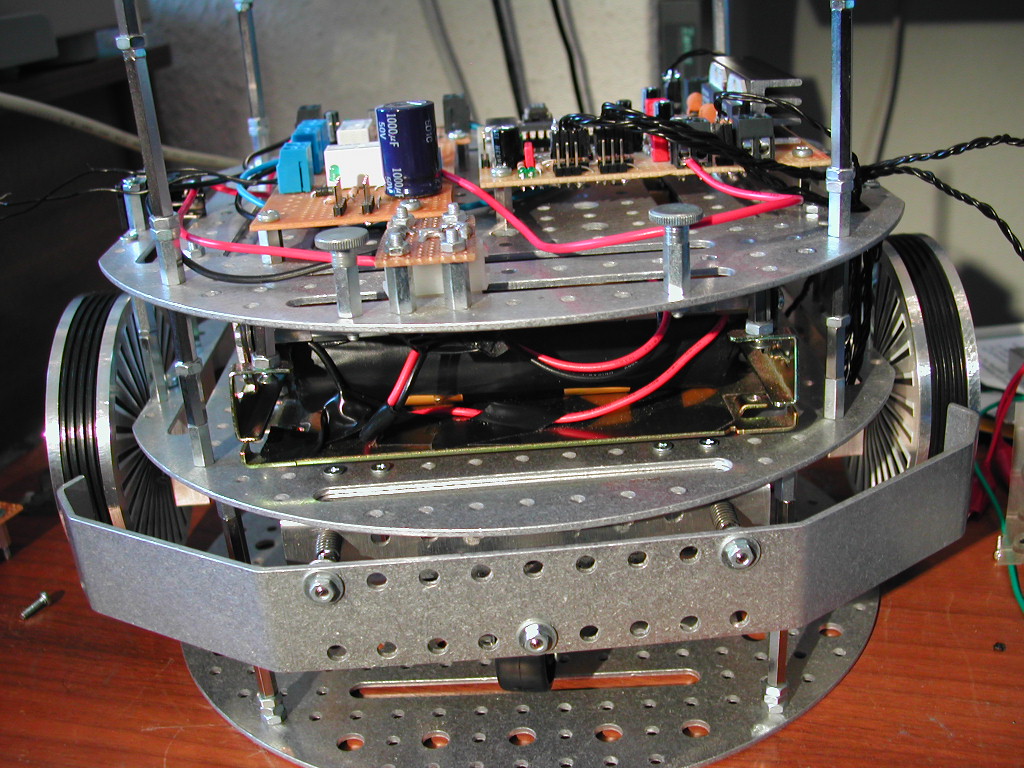
So wurden die Motoren von den Rädern entkoppelt (in einer früheren Version waren sie direkt an den Rädern angebracht) |
Eines der Stützräder und im Vordergrund eine der Stoßstangen |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
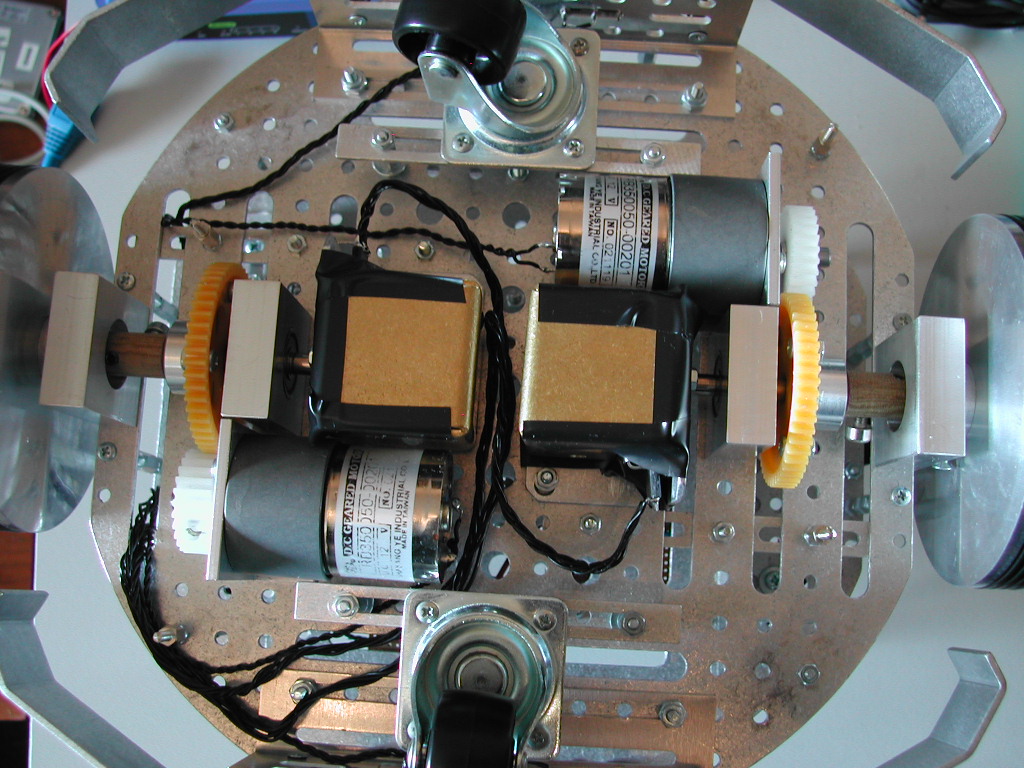
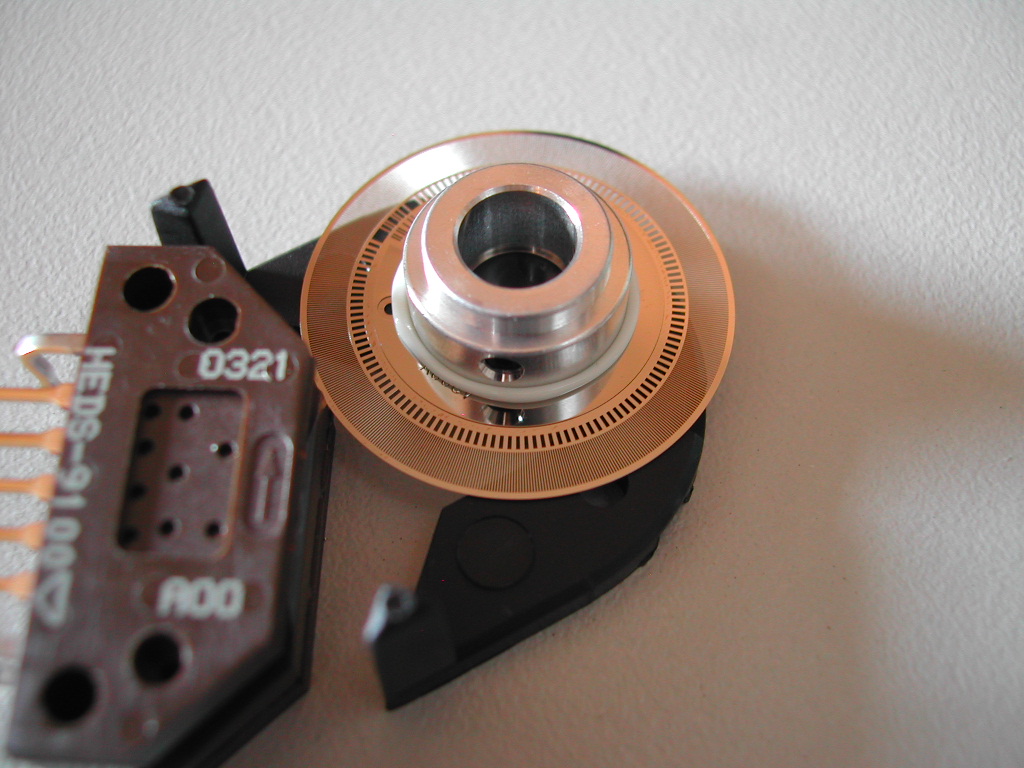
Unter den Messing Abdeckungen in der Mitte befinden sich die ... |
... extrem hochauflösenden Drehgeber. Auf diesem Foto sieht man eine 500CPR Version ;) (im Roboter sind 360er) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
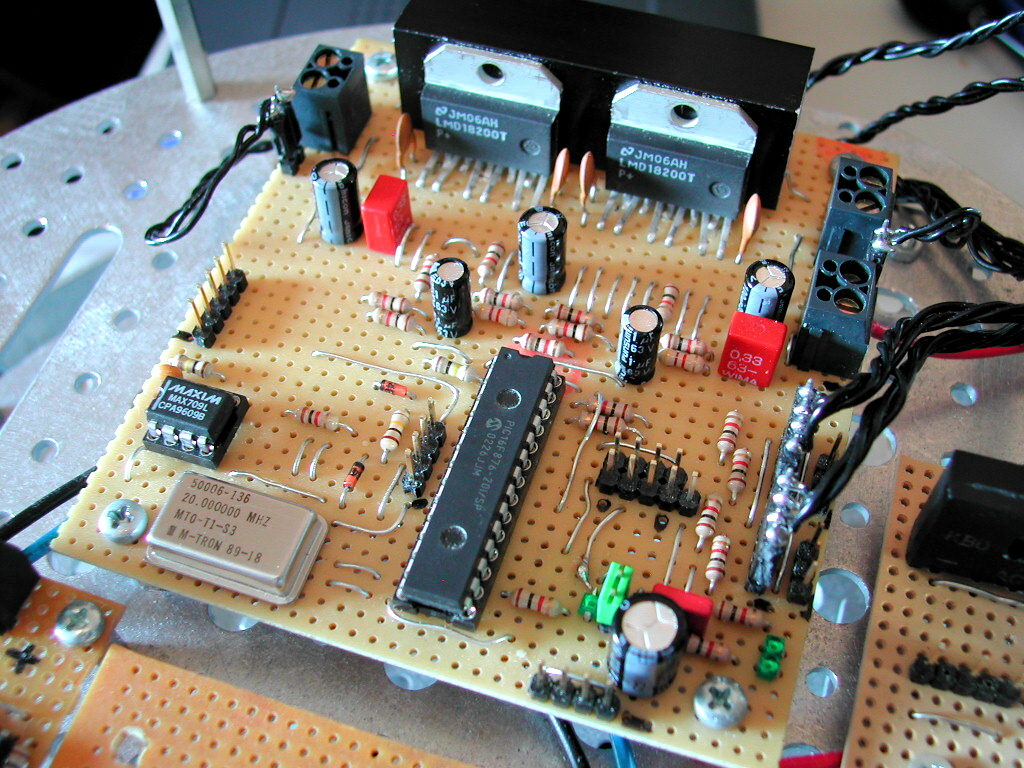
Der Motor Controller. Auf dem PIC wurde ein sehr kompliziertes Regelkreissystem implementiert, welches den Gleichlauf der Antriebsräder ermöglicht. |
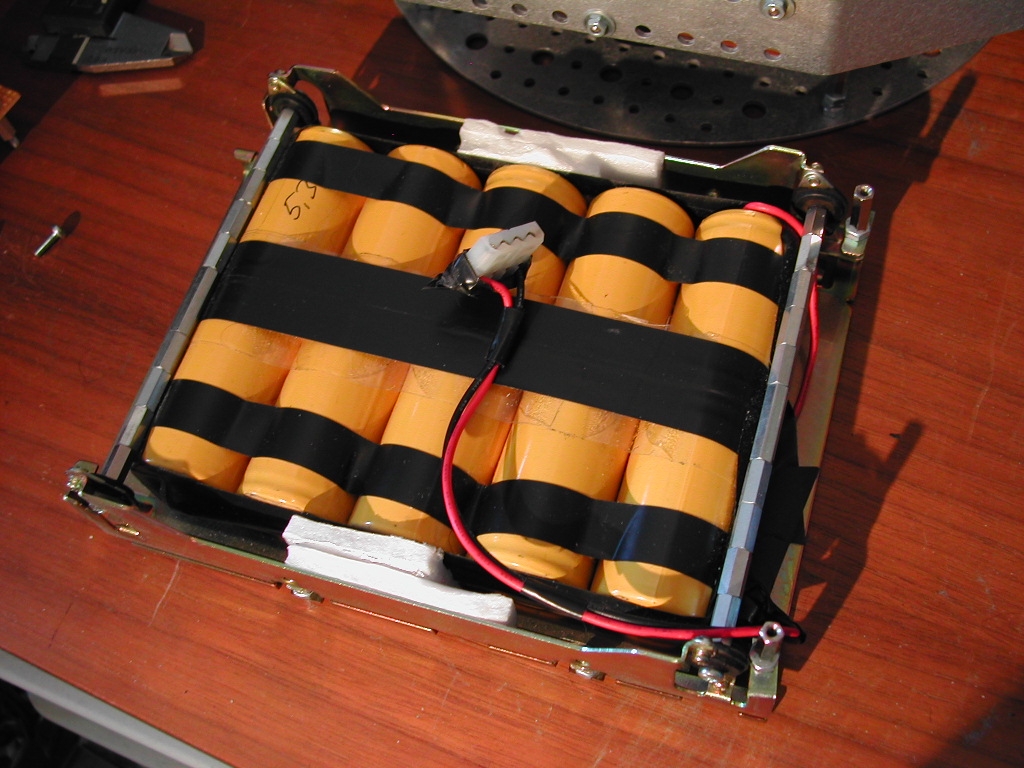
Eines der 12V 5Ah NiCd Akkupacks. Diese sehr schweren Akkus können leicht... |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
... ausgetauscht werden. |
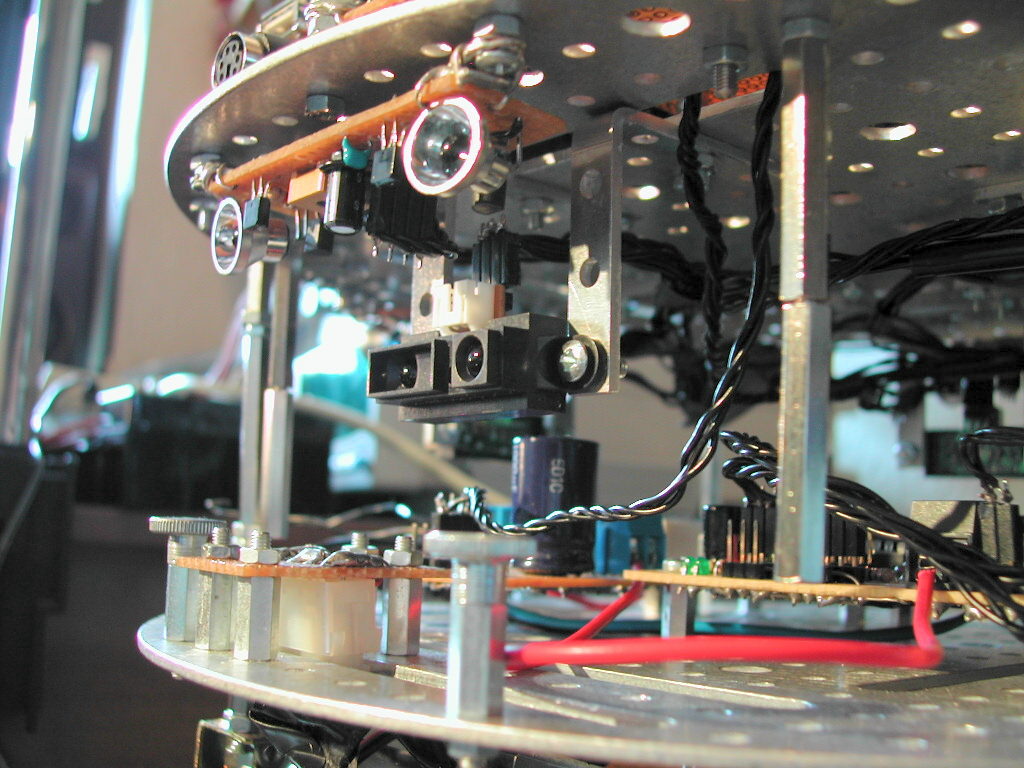
Drei der Infrarotsensoren. Oben zwei IS471 und unten ein GP2D120 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
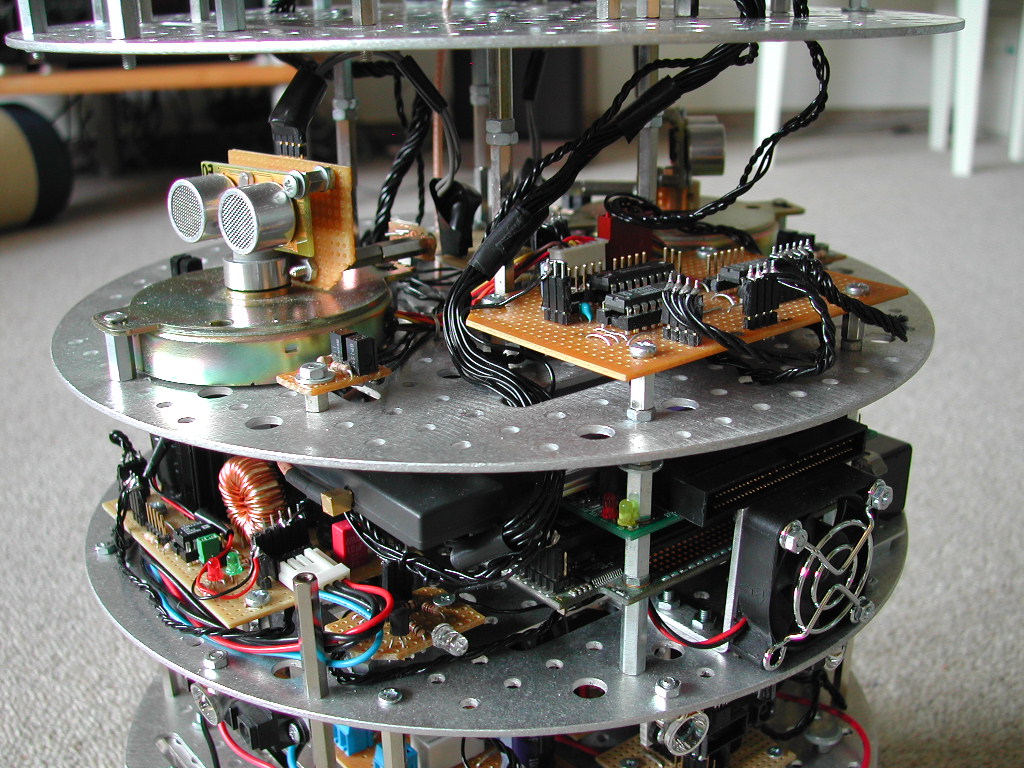
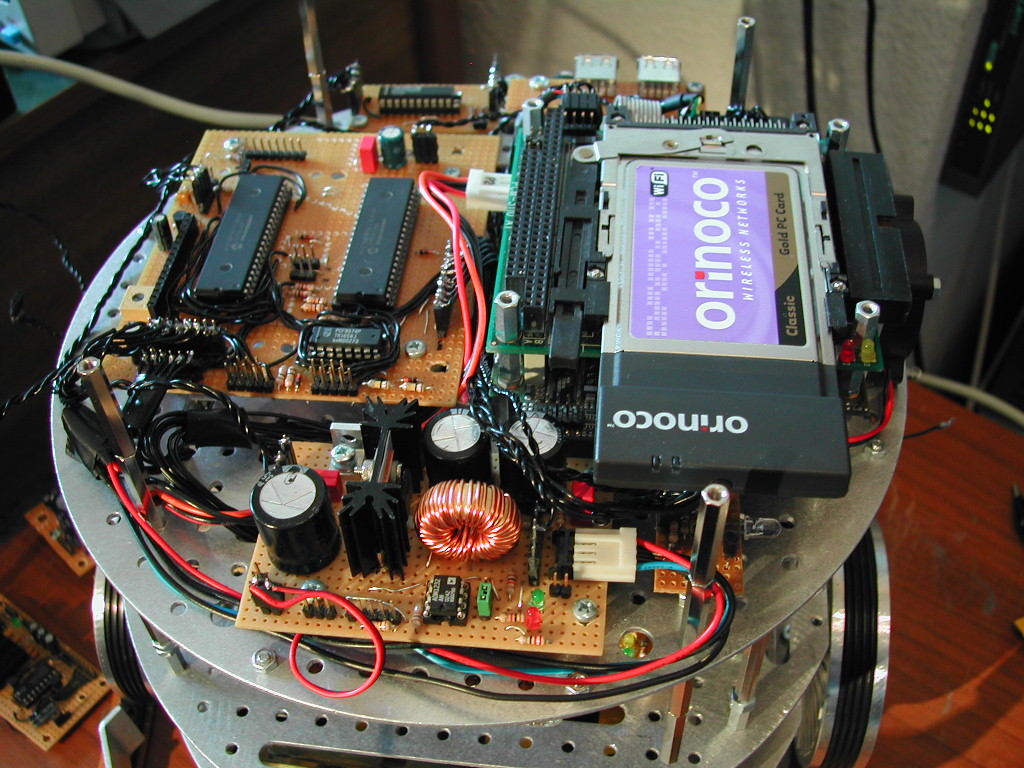
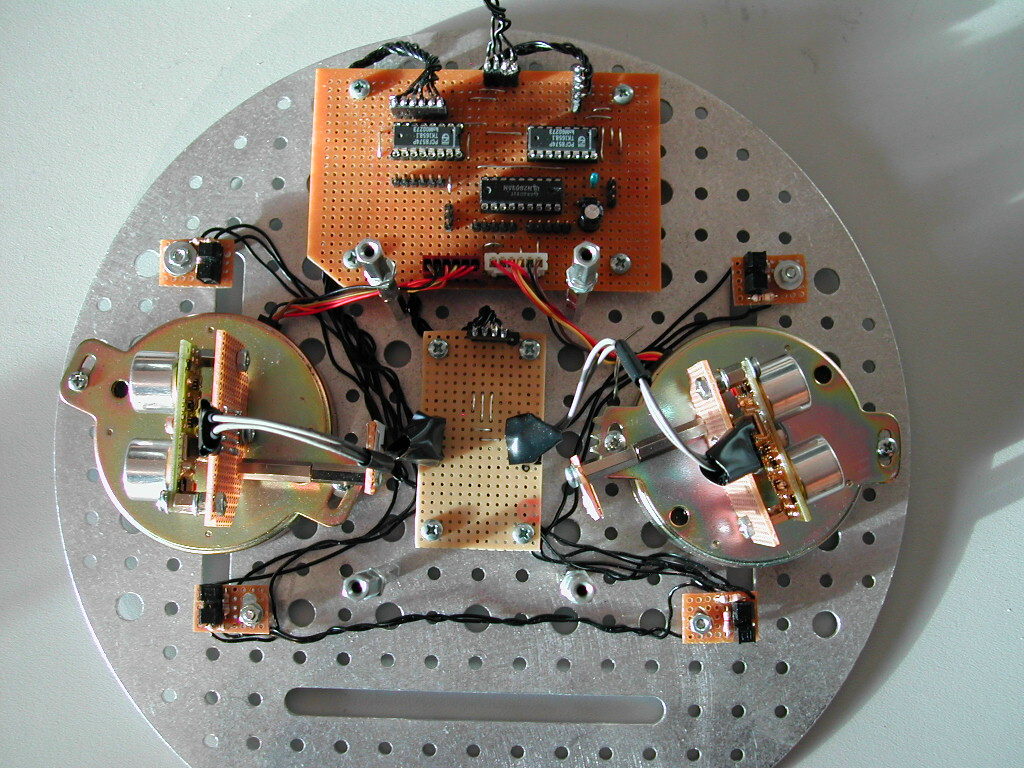
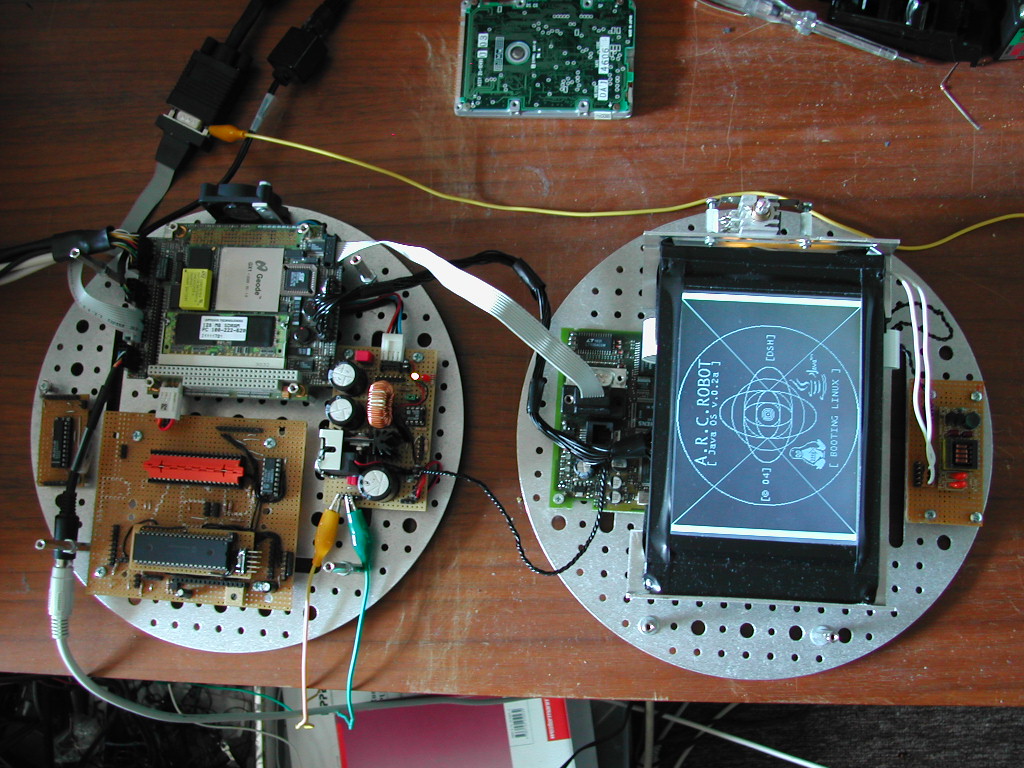
Hier sieht man die "Intelligenz" des Roboters: links das Mainboard mit dem Haupt Mikrocontroller und einem weiteren, rechts der embedded PC mit PCMCIA WLAN Karte. Im Vordergrund ist ausserdem der DC/DC Wandler zu sehen. |
Der Ultraschallscanner aus der Vogelperspektive. Man erkennt hier sehr gut wie mit vier kleinen Gabellichtschranken die Rotation kontolliert wird. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
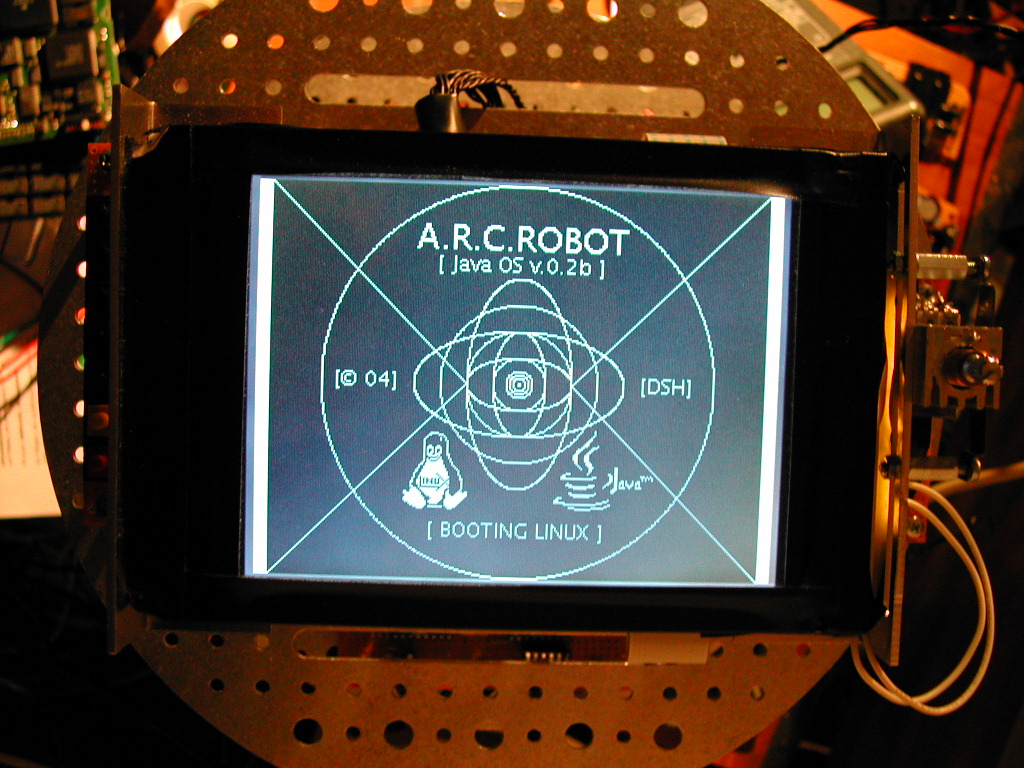
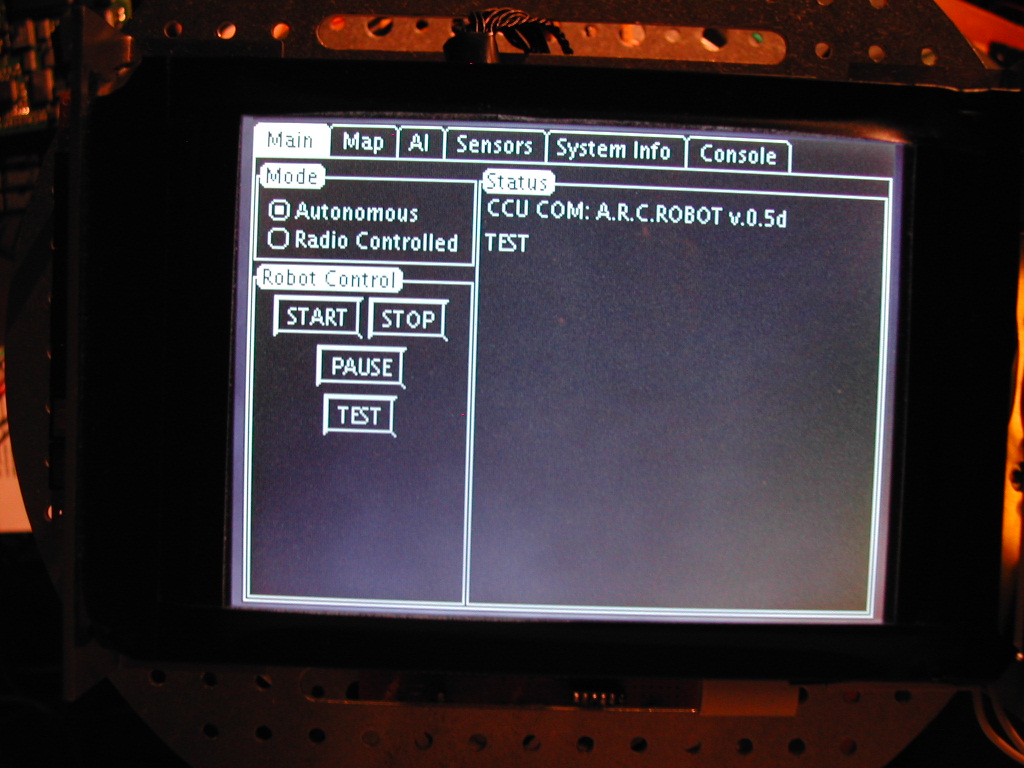
Das Grafik Display des Roboters. Die Grafikroutinen mussten selbst entwickelt werden (angefangen bei Linien und Ellipsen zeichnen...) |
Zusätzlich gibt es eine komplette Grafikbibliothek die ähnlich wie das Java AWT aufgebaut ist. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
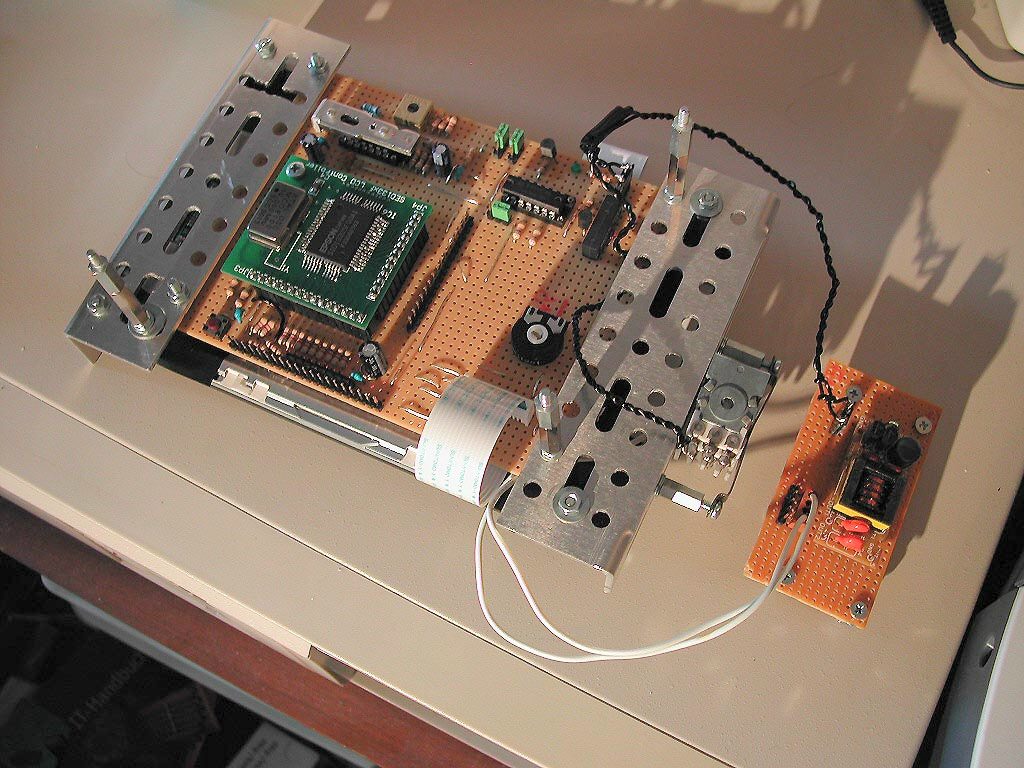
Auch die Steuerungselektronik wurde selbst gebaut. (bis auf die kleine Platine mit Epson Controller und RAM - könnte man ja sonst nicht auf der Lochrasterplatine unterbringen) |
Einer der ersten Tests des Rechners mit dem Display am LPT Port. Unter dem Display sieht man hier noch das alte Funkmodem. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Java Client PC Software - Screenshots | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
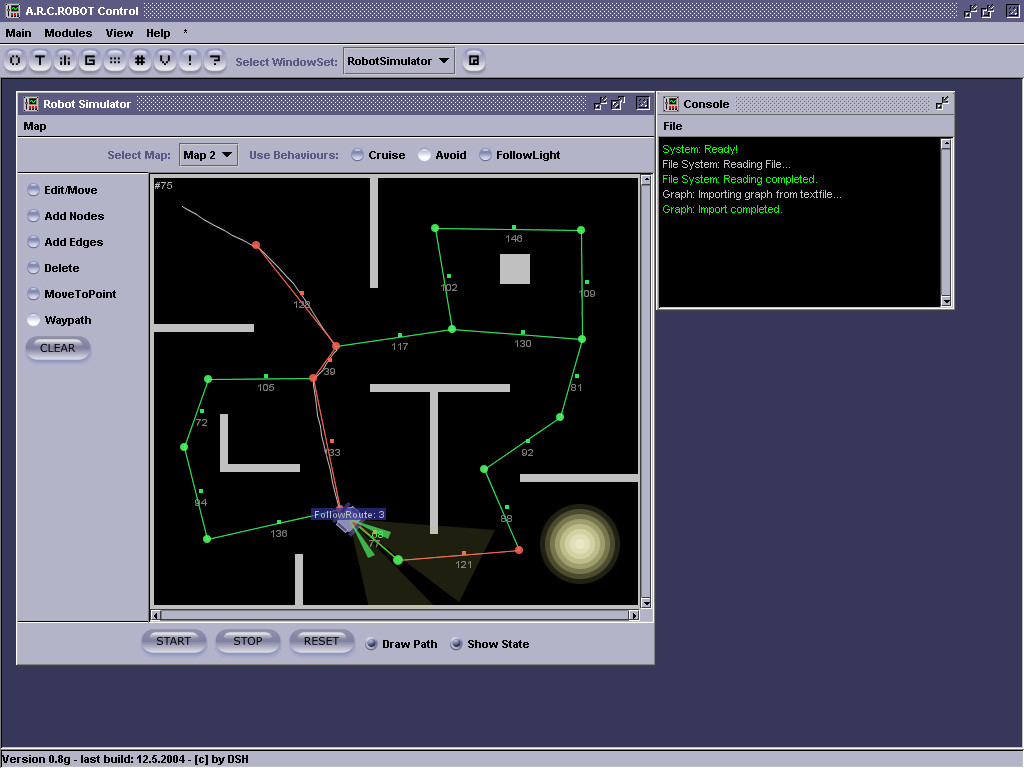
Die Software ist als MDI organisiert und Modular ausgelegt. Jedes der Module wird in einem eigenen Fenster dargestellt. Alle Sensordaten werden z.B. im Modul "WatchWindow" aufgelistet, einige davon werden im Modul "Robot" visualisiert, der Roboter kann über das Modul "Remote" gesteuert werden usw. usf. |
Ein Simulator gehört ebenfalls zur Software. Auf dem Screenshot erkennt man eine etwas vereinfachte Version des Roboters, der gerade eine Route geplant hat und diese nun abfährt. (Das soll der reale Roboter später auch mal können...) Die Karte kann direkt im Simulator erstellt und editiert werden. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Fahrtest Videos | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Hier finden Sie einige (ältere) Videos des Roboters. Er wurde während den Aufnahmen per WLAN vom Client PC aus gesteuert. Diese Videos zeigen hauptsächlich die Funktionsweise des Regelungssystems. (z.B. in Video 2) Die Videos wurden mit einer älteren Digitalkamera erstellt und sind deshalb jeweils immer nur 40 Sekunden lang (320x240 @ 15fps ) und jeweils etwa 2,7 MB groß. (Zum Download die Links rechts anklicken und "Ziel speichern unter" wählen!) Video 1 ( Fahrtest; gleicher Bodenbelag ) Video 2 ( Fahrtest; verschiedene Bodenbeläge - hier sieht man gut wie die elektronische Regelung unterschiedliche Belastungen beider Antriebsräder ausgleicht und die Geschwindigkeit möglichst konstant hält) Video 3 ( " ) Video 4 ( " ) Video 5 ( älteres Video - Roboter ohne Antenne und Kamera ) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 1. Platz beim Roboternetz.de Wettbewerb 2005 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Die größte deutsche Robotik Community Roboternetz.de
hatte Ende 2004 bzw. Anfang 2005 einen Roboterwettbewerb ausgeschrieben, bei dem alle User aus 36 Teilnehmern den Sieger wählen konnten. Das war dann mit 26% der Stimmen der A.R.C.ROBOT :-) Rechts seht ihr die Urkunde. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| c't Wettbewerb "Mach Flott den Schrott" | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Dieser Wettbewerb war eigentlich nicht für Roboter gedacht (weshalb ich auch keinen
Preis gewonnen habe). Es ging jedoch darum aus alten Computerteilen bzw. "Hightech Resten" neue und sinnvolle Dinge zu kontruieren. Deshalb passte mein Roboter mit seinem Linux PC und vielen Teilen aus alten Computern doch relativ gut zu dem Wettbewerb und ich meldete ihn einfach mal an.
Und der A.R.C.ROBOT kam auch sehr gut bei den Usern von Heise Online an, denn bei 169 Beiträgen insgesamt ist er unter die ersten 30 gekommen, die dann auf der CeBIT 2005 vorgestellt wurden. Da ich keine Zeit hatte den Roboter zur CeBIT zu bringen, ist ein Reporter vom HR vorbeigekommen und hat ein kleines Video vom A.R.C.ROBOT gedreht. (übrigens hat der Reporter im Video wohl versehentlich aus 50%, 75% gemacht...) Dies wurde dann auf einem großen Plasma Bildschirm in einer Endlosschleife auf dem Heise Stand zusammen mit zwei weiteren Projekten die nicht zur CeBIT kommen konnten gezeigt. Auch bei der Preisverleihung war es auf einer großen Leinwand zu sehen und die ersten 35 Sekunden wurden sogar am 19.3.2005 um 12:30 Uhr im Fernsehen bei CT Magazin TV auf HR gezeigt! (Hier gibt es die komplette Sendung als Real Stream.) Das Video ist eine Minute lang und kann in stark komprimierter Form hier heruntergeladen werden: --- A.R.C.ROBOT c't VIDEO --- ( Kamera: Sony 16:9 DV Kamera; komprimiertes Video: 500x288px, DVD MPEG, 58 Sekunden, 7.9MB) Mit freundlicher Genehmigung des c't Magazins. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Zeitungsartikel | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Ein Anreiz zur Konstruktion des Roboters war (unter anderem - macht ja schließlich auch ne menge Spaß ;) ) auch die sog. "Besondere Lernleistung". Diese Arbeit ist ähnlich der normalen Facharbeit, nur viel umfangreicher und die Bewertung fließt mit in die Abiturwertung ein. Meine Lehrer waren natürlich recht beeindruckt von dem Roboter und auch der Arbeit von Johannes Steins und haben deshalb gleich einen kleinen Pressetermin arrangiert. Nebenstehend sieht man das Ergebnis ;) (Artikel aus dem "Westfälischen Volksblatt") |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Copyright | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
d.herwald@dsh-elektronik.de |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}